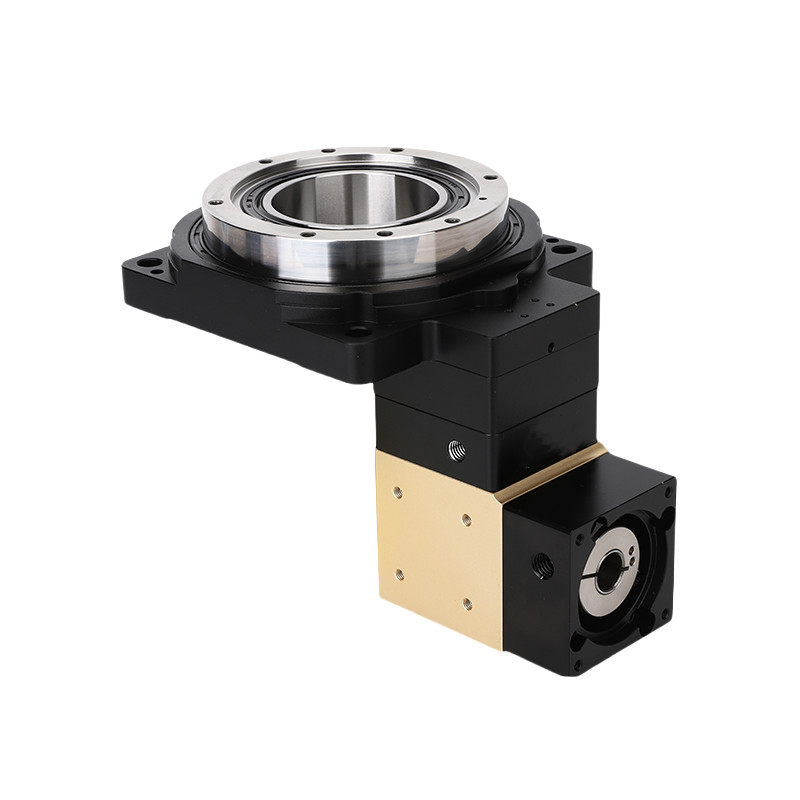
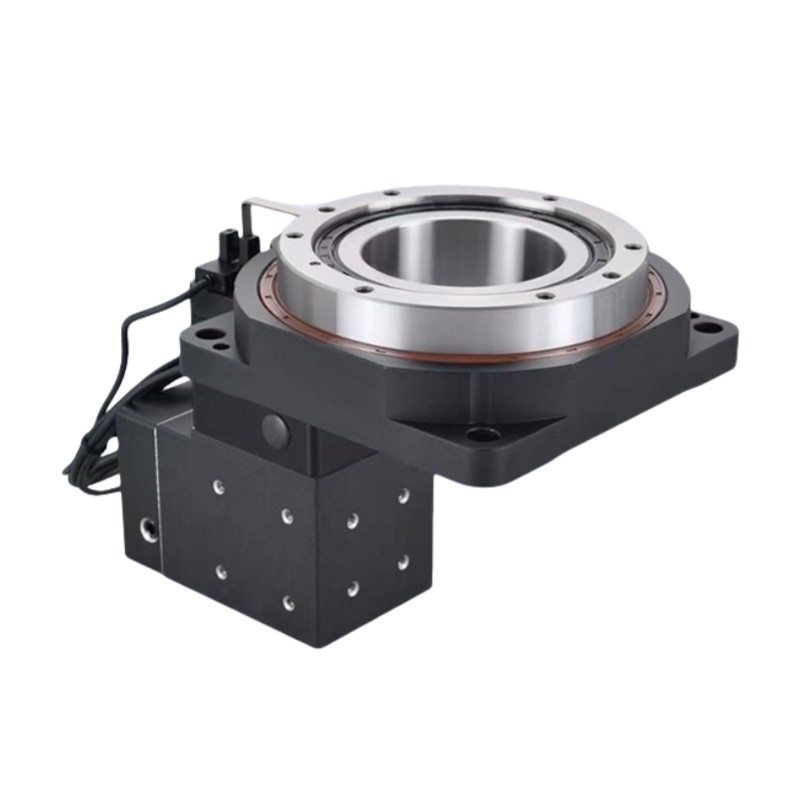
Serie HRG 80ZTavolo rotativo a angolo retto cavo
Right Angle Hollow Rotary Table is a kind of rotating load device that specially designed for 90 degree force direction changes in some application for the purpose of spacing saving or special mechanism design.
L'adozione del corpo morbido progettato con un ingranaggio a busta a spirale superiore e il design ottimizzato della superficie dei denti di contatto rendono il carico uniforme e consentono un'elevata coppia di uscita.Quando si combina con il riduttore planetario, il rapporto di ingranaggio deve aumentare fino a raggiungere:50.
Componenti chiave
Piastra di base: La fondazione che sostiene l'intero assemblaggio e consente il montaggio su macchine.
Meccanismo rotativo: compresi gli ingranaggi o i motori che consentono la rotazione a 360 gradi del tavolo.
Fuoco vuoto: la sezione cava centrale che permette il passaggio di attrezzi, liquidi di raffreddamento o cablaggi.
Tavolo in alto: La superficie su cui sono posizionati i pezzi da lavorare, spesso dotati di fessure in T per la pinza.
Meccanismo di regolazione dell'angolo: consente un angolo preciso del tavolo per ottenere le posizioni di lavorazione desiderate.
Sistema di cuscinetti: fornisce una rotazione e una stabilità agevoli durante il funzionamento.
Sistema di controllo: può includere letture digitali o integrazione CNC per posizionamento e movimento precisi.
Caratteristiche chiave
Progettazione ad angolo retto: consente la realizzazione di lavorazioni verticali e orizzontali.
Hollow Center: agevola il movimento di strumenti o materiali attraverso il tavolo.
Controllo di precisione: dotato di meccanismi di posizionamento e rotazione accurati.
Durabilità: costruito con materiali robusti per sopportare carichi di lavorazione pesanti.
 |
Modello |
Modello |
Modello |
Rapporto di angolo retto |
| Tavolo rotativo cavo |
Angolo retto |
|
HRG85Z
|
HRG85 |
HAS060 |
2, 3
|
| Parametro di prestazione HRG80Z-05 |
| Supporto della piattaforma di uscita |
Cuscinetti a rulli incrociati |
Velocità di uscita ammissibile |
200 giri al minuto |
Inerzia di rotazione |
1203x10-6 kg.m2 |
| Movimento di spostamento |
360° ((Rotation in qualsiasi angolo) |
Accuratezza del posizionamento ripetitivo |
± 15 secondi di arco |
Accuratezza del posizionamento |
≤ 30 secondi di arco |
| Motore corrispondente (dimensioni) |
Servomotore da 200 a 400 W
Φ14-Φ50-Φ70-M4 |
Carico assiale ammissibile |
3000N |
Lubrificazione |
Grassi sintetici |
| Rapporto di riduzione |
10 |
15 |
Carico radiale ammissibile |
2000N |
temperatura di funzionamento |
¥-10°C~90°C |
| Torsione di uscita nominale |
18NM |
Parallelismo della piattaforma di output |
00,02 mm |
Vita di servizio |
20000h |
| Torsione massima di accelerazione |
32.4NM |
Flusso della superficie della piattaforma di uscita |
0.01 mm |
Livello di produzione |
Protezione IP65 |
| Torsione di arresto di emergenza |
54NM |
Flusso di eccircolo della piattaforma di uscita |
0.01 mm |
Livello di rumore |
≤ 65 dB |
| Parametro di prestazione HRG80Z-10 |
| Supporto della piattaforma di uscita |
Cuscinetti a rulli incrociati |
Velocità di uscita ammissibile |
200 giri al minuto |
Inerzia di rotazione |
1203x10-6 kg.m2 |
| Movimento di spostamento |
360° ((Rotation in qualsiasi angolo) |
Accuratezza del posizionamento ripetitivo |
± 15 secondi di arco |
Accuratezza del posizionamento |
≤ 30 secondi di arco |
| Motore corrispondente (dimensioni) |
Servomotore da 200 a 400 W
Φ14-Φ50-Φ70-M4 |
Carico assiale ammissibile |
500N |
Lubrificazione |
Grassi sintetici |
| Rapporto di riduzione |
20 |
30 |
Carico radiale ammissibile |
250 N |
temperatura di funzionamento |
¥-10°C~90°C |
| Torsione di uscita nominale |
18NM |
Parallelismo della piattaforma di output |
00,02 mm |
Vita di servizio |
20000h |
| Torsione massima di accelerazione |
32.4NM |
Flusso della superficie della piattaforma di uscita |
0.01 mm |
Livello di produzione |
Protezione IP65 |
| Torsione di arresto di emergenza |
54NM |
Flusso di eccircolo della piattaforma di uscita |
0.01 mm |
Livello di rumore |
≤ 65 dB |
Immagini dettagliate
Disegni
Applicazioni della piattaforma rotabile cava
Robotica
Utilizzato in braccia e manipolatori robotici per posizionamento e movimento precisi nei compiti di assemblaggio e nella movimentazione dei materiali.
Sistemi di automazione
Integrato in linee di produzione automatizzate per compiti quali la selezione, l'imballaggio e la palettizzazione, dove un movimento di rotazione accurato è essenziale.
Macchine per la lavorazione CNC
Utilizzato nelle macchine CNC per la rotazione precisa dei pezzi da lavorare durante le operazioni di fresatura, perforazione e tornitura.
Apparecchiature mediche
Utilizzato in dispositivi medici come sistemi di imaging, robot chirurgici e automazione di laboratorio per posizionamento e movimento accurati.
Aerospaziale e difesa
Applicato in simulatori di volo, sistemi radar e UAV per un orientamento e una stabilizzazione precisi.
Servizi di telecomunicazione
Utilizzato nei sistemi di posizionamento delle antenne per garantire un allineamento accurato per una trasmissione ottimale del segnale.
Imballaggio e spedizione

 Il tuo messaggio deve contenere da 20 a 3000 caratteri!
Il tuo messaggio deve contenere da 20 a 3000 caratteri!